 AgrandarAurich / Getty
AgrandarAurich / Getty
El 3 de noviembre de 2007, seis vehículos hicieron historia con éxito navegar en un entorno urbano simulado y cumplir con Leyes de tránsito de California, sin conductor al volante. Cinco de los seis lucían un revolucionario nuevo tipo de sensor lidar que había sido presentado recientemente por un fabricante de equipos de audio llamado Velodyne
Una década después, el lidar de Velodyne sigue siendo crucial tecnología para autos sin conductor. Los costos de Lidar están bajando pero Todavía son bastante caros. Velodyne y un enjambre de startups son tratando de cambiar eso
En este artículo, profundizaremos en la tecnología LIDAR. Explicaremos cómo funciona la tecnología y los desafíos. los tecnólogos se enfrentan mientras intentan construir sensores lidar que cumplan con el requisitos exigentes para automóviles comerciales sin conductor.
Algunos expertos creen que la clave para construir LIDAR que cuesta cientos de dólares en lugar de miles es abandonar Velodyne’s diseño mecánico, donde un láser gira físicamente alrededor de 360 grados, varias veces por segundo, a favor de un diseño de estado sólido que tiene pocas o ninguna parte móvil. Eso podría hacer que las unidades más simple, más barato y mucho más fácil de producir en masa.
Nadie sabe cuánto tiempo tomará construir rentable lidar de grado automotriz, pero todos los expertos con los que hablamos fueron optimistas Señalaron las muchas generaciones anteriores de tecnología, desde calculadoras de mano hasta frenos antibloqueo, que se convirtió en radicalmente más baratos ya que se fabricaron a escala. Aparece Lidar estar en una trayectoria similar, lo que sugiere que a la larga, los costos de LIDAR no serán una barrera para la adopción generalizada de autos sin conductor.
Un pionero lidar poco probable
 Agrandar / El lidar de 64 canales de Velodyne fue un gran avance para los conductores sin conductor coches Steve Jurvetson
Agrandar / El lidar de 64 canales de Velodyne fue un gran avance para los conductores sin conductor coches Steve Jurvetson
Los científicos han estado usando luz láser para medir distancias desde la década de 1960, cuando un equipo del MIT midió con precisión el distancia a la luna haciendo rebotar la luz láser. Pero el historia de lidar para autos sin conductor comienza con emprendedor y inventor David Hall.
A principios de la década de 2000, Hall fue el fundador y CEO de Velodyne, un exitoso fabricante de equipos de audio. Hall también era una robótica entusiasta.
“Aparecimos enBattleBotsandRobot Guerra de guerra en ese momento, que fue principalmente una excusa para anunciando nuestro altavoz Velodyne “, dijo Hall a Wired en un reciente entrevista.
Entonces, cuando DARPA, la agencia de investigación militar que dio a luz Internet, anunció una carrera de autos robot llamada Grand Challenge, Hall decidió entrar. Para la competencia de 2004, Hall y su hermano construyó un camión robot guiado por un par de cámaras. Ese el enfoque no funcionó lo suficientemente bien como para terminar la carrera, pero tampoco El robot de alguien más.
Para la segunda carrera de DARPA en 2005, los hermanos Hall abandonaron cámaras y se centró en lidar en su lugar. Otros equipos también estaban usando LIDAR, pero los sensores LIDAR en el mercado eran primitivos. Un famoso lidar en ese momento era el SICK LMS-291. Este era un bidimensional sistema LIDAR, lo que significa que solo puede escanear un solo corte horizontal del mundo.
Eso ayudó a los automóviles a detectar objetos como paredes y troncos de árboles que Fue directamente desde el suelo. Pero podría poner a los equipos en problemas si encontraban obstáculos, como los brazos cruzados de ferrocarril, con más formas irregulares Y era inútil si los autos quisieran realmente reconocer objetos, como distinguir a un peatón de una calle firmar, por ejemplo, en lugar de simplemente evitar obstáculos.
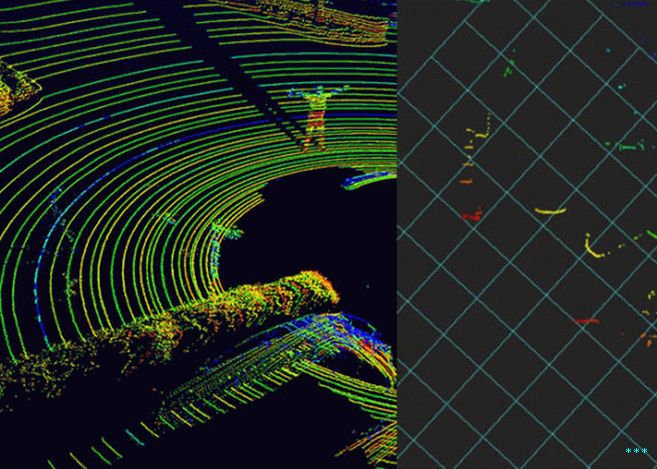 Agrandar / La nube de puntos tridimensional capturada por un láser Velodyne 64 lidar (left) is far richer than the point clouds captured bylidares bidimensionales como la serie SICK 200 (derecha) .Velodyne / Gerry
Agrandar / La nube de puntos tridimensional capturada por un láser Velodyne 64 lidar (left) is far richer than the point clouds captured bylidares bidimensionales como la serie SICK 200 (derecha) .Velodyne / Gerry
Entonces los hermanos Hall desarrollaron un nuevo tipo de lidar. Ellos montaron una pila de 64 láseres en un cardán giratorio que gira alrededor de 360 grados Esto permitió que la unidad recolectara un verdadero tridimensional Vista del mundo alrededor del vehículo.
Los hermanos Hall no ganaron la carrera de 2005, pero sus superiores El sensor LIDAR atrajo el interés de otros equipos. En el momento de Tercera y última carrera DARPA de DARPA en 2007, Velodyne había comenzado fabricando unidades lidar y vendiéndolas. Hall no entró en el Carrera de 2007, pero la mayoría de los mejores equipos, incluidos cinco de seis de los eventuales ganadores, lucían Velodyne lidar.





